RustChinaConf2020 精选 | Rust 异步与并发
说明:本文为视频演讲文字版,编者听录的时候可能会出现一些误差,欢迎指正。
讲师:赖智超 - Onchain 区块链架构师
视频地址:https://www.bilibili.com/video/BV1Yy4y1e7zR?p=14
后期编辑:李冬杰,阿里巴巴淘系技术部,花名齐纪。
————————
自我介绍
大家好,今天我跟大家分享一下 Rust 的异步模型,以及实现这个模型时面临的一些并发方面的挑战。首先介绍一下 Rust 在我们公司的应用情况,我们公司在区块链是布局比较早的,现在大概成立有四年多了,目前我们公司主要还是 golang 为核心的技术栈,但是在 Rust 方面我们也在积极探索,有一些应用的实践。首先我们的区块链支持 wasm 虚拟机,使用 Rust 基于 cranelift/wasmtime 实现了 JIT 的版本,目前已经运行了一年多了。有了 wasm 虚拟机的支持后,我们也在智能合约和配套的工具链上下了功夫,目前团队智能合约开发首选 Rust,它具有开发效率高和迭代速度快的优点,前些天统计我们使用 Rust 开发的智能合约代码已经上 10 万了。还有密码学库,我们也是用的 Rust。
- 区块链 wasm JIT 虚拟机:基于 cranelift/wasmtime;
- 智能合约开发库和配套的工具链:目前合约开发都首选 Rust,开发效率高,迭代速度快;
- 密码学库;
同步任务多线程池
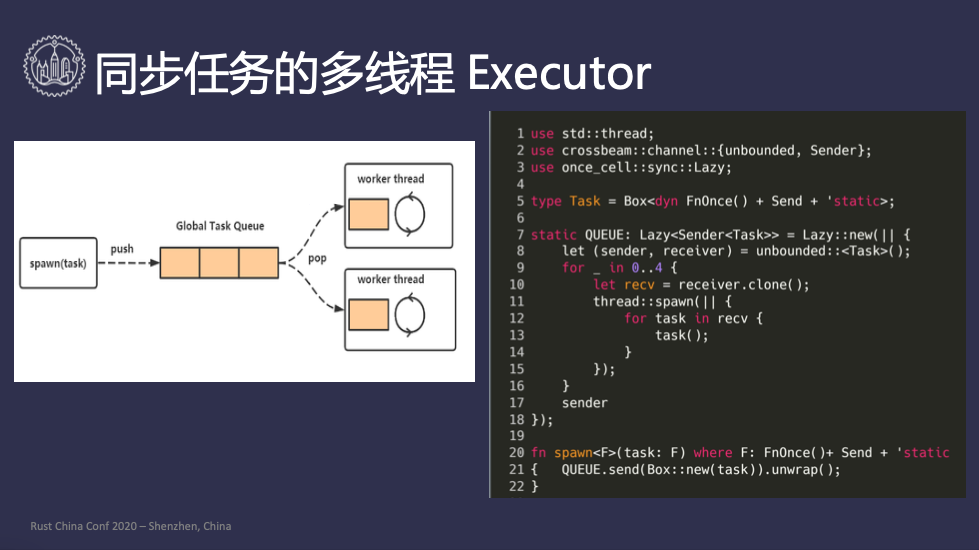
为了讲解异步编程模型,我们先来看一看大家都比较熟悉的同步任务多线程池的实现,一个比较典型的实现如 PPT 左图所示,有一个全局的队列(Global Task Queue),由用户调用 spawn 把任务压到全局队列,全局队列关联着一个或者多个 worker 线程,每个工作线程都会轮询的从全局队列中把任务拿出来执行,用代码实现也比较简单。
#![allow(unused)] fn main() { use std::thread; use crossbeam::channel::{unbounded, Sender}; use once_cell::sync::Lazy; type Task = Box<dyn FnOnce() + Send + 'static>; static QUEUE: Lazy<Sender<Task>> = Lazy::new(|| { let (sender, reciver) = unbounded::<Task>(); for _ in 0..4 { let recv = reciver.clone(); thread::spawn(|| { for task in recv { task(); } }) } sender }); fn spawn<F>(task: F) where F: FnOnce() + Send + 'static { QUEUE.send(Box::new(task)).unwrap(); } }
首先我们在第5行代码定义了什么叫做同步任务,因为同步任务的话只需要执行一次就行了,所以是 FnOnce(),因为这个任务是从用户线程 push
到全局队列,跨线程到工作线程,所以需要有Send约束和 static 生命周期,然后封装到 Box 中。第 8 行构建了一个并发的队列,起了 4
个线程,每个线程拿到队列的接收端,然后在一个循环中执行 task,当然执行 task 的过程可能会 panic,这里为了演示我就没有处理。第17行 sender 就保存着在全局静态变量 QUEUE 上,当用户调用 spawn时,拿到 QUEUE 调用 send 方法,将任务 push 到队列中。
异步任务的多线程
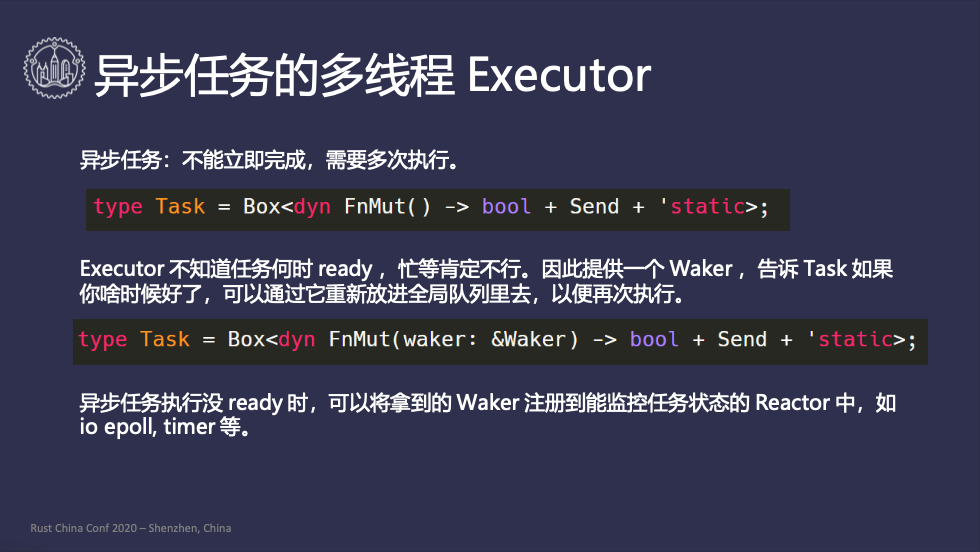
#![allow(unused)] fn main() { type Task = Box<dyn FnMut() -> bool + Send + 'static>; }
接下来我们看一下异步任务的多线程池,首先定义不能立即完成,需要多次执行的任务为异步任务,因此 FnOnce() 就不满足了,需要使用
FnMut ,它返回的结果是个布尔值,表示是否执行完任务。但是这样定义就有个问题,如果这个函数没有被工作线程执行完,工作线程就不知道接下来该怎么办了,如果一直等着直到这个任务能够执行,全局队列中的其他任务就不能被执行;直接扔掉这个任务也不行。因此Rust的设计用了一个很巧妙的办法,Exector 就不关心这个任务什么时候好,在执行的时候创建一个 Waker,然后告诉 task,“如果你什么时候好了,可以通过 Waker 把它重新放到全局队列里去” 以便再次执行,这样的话 Task 的定义就多出了 Waker 参数,如下所示:
#![allow(unused)] fn main() { type Task = Box<dyn FnMut(&Waker) -> bool + Send + 'static>; }
这样异步任务执行没有 ready 的时候,可以将拿到 Waker 注册到能监控任务状态的 Reactor 中,如 ioepoll、timer 等,Reactor 发现任务 ready 后调用 Waker 把任务放到全局队列中。
异步任务的多线程 Executor

在Rust中,对于异步计算的标准定义是Future trait
#![allow(unused)] fn main() { pub enum Poll<T> { Ready(T), Pending, } pub trait Future { type Output; fn poll(&mut self, cx: &Waker) -> Poll<Self::Output>; // fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output>; } }
poll 方法返回的是一个枚举类型 Poll,它和返回布尔值是类似的,只不过语义会更清晰一些,如果没好的话就返回一个 Pending,好了的话就返回一个
Ready。标准库里用的不是&mut self,而是Pin<&mut Self>,因为 30 分钟讲不完,所以在这里先跳过。下面就是整个异步任务多线程的模型图:
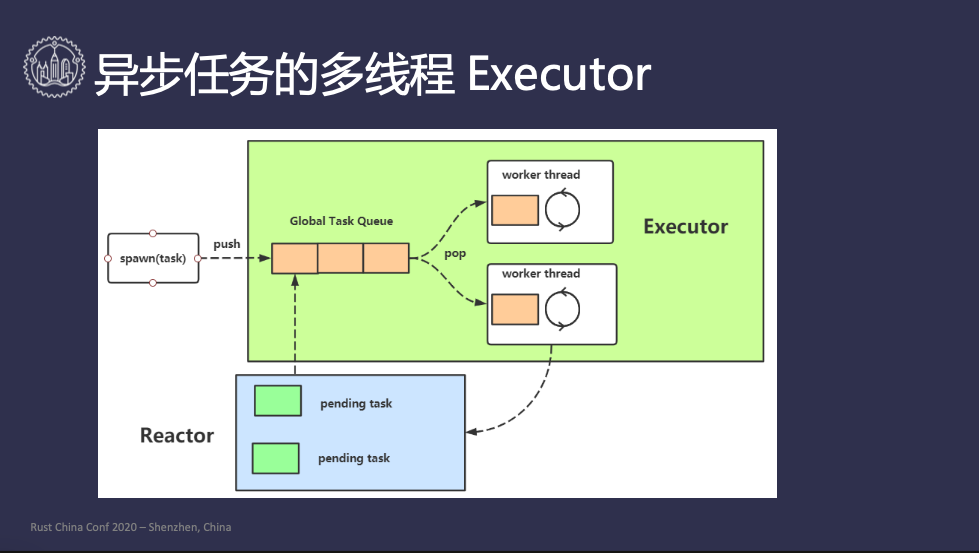
首先用户通过 spawn 函数把异步任务 push 到全局队列里去,然后工作线程会拿到 task 执行,并且创建一个 Waker,传给执行的 Future,如果任务执行完成了,那就
ok 了;如果没执行完成,Future 负责把 Waker 注册到 Reactor 上面,Reactor 负责监听事件,收到事件后会把 Waker 唤醒,把 task
放到全局队列中,这样下次其他线程可以拿到这个 task 继续执行,这样循环重复直到任务执行完毕。
Waker 接口的要求
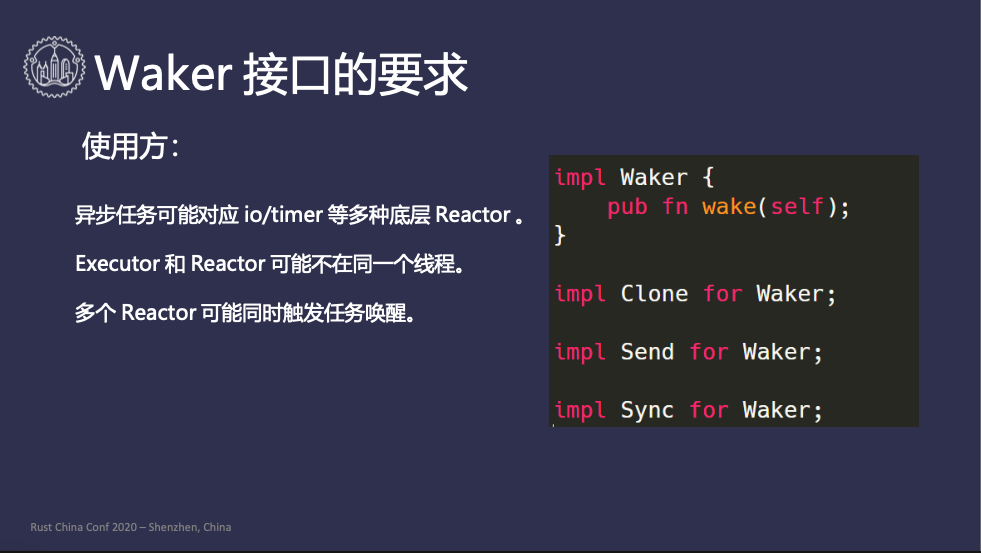
Waker 在这个过程中充当着十分重要的角色,我们来看一下 Waker 的接口需要满足哪些要求:
#![allow(unused)] fn main() { impl Waker { pub fn wake(self); } impl Clone for Waker; impl Send for Waker; impl Sync for Waker; }
对于使用方的要求,首先 Waker 本身是唤醒的功能,所以它要提供一个 wake 方法。异步任务可能会关心多个事件源,比如说定时器、IO,也就是说 Waker 可能对应不同的
Reactor,因为 Future 在 poll 的时候只是传了一个 Waker,现在要把 Waker 注册到多个 Reactor 上,就需要 clone。然后
Executor 和 Waker 可能不在一个线程里面,Waker 需要跨线程发送到 Reactor 上面,所以也就需要一个 Send
的约束。最后多个事件源可能同时调用这个 Waker,这里就存在并发调用的问题,要满足并发调用的话就需要实现Sync约束。这是对 Waker 使用方的要求。

#![allow(unused)] fn main() { impl Waker { pub unsafe fn from_raw(waker: RawWaker) -> Waker } pub struct RawWaker { data: *const (), vtable: &'static RawWakerTable, } pub struct RawWakerTable { clone: unsafe fn(*const ()) -> RawWaker, wake: unsafe fn(*const ()), wake_by_ref: unsafe fn(*const ()), drop: unsafe fn(*const ()) } }
不同的 Executor 有不同的内部实现,而 Waker 又是一个公共统一的 API。有的Executor有一个全局队列,有的是一个线程局部队列,有的
Executor 可能只支持单个 task 的执行,因此他们的唤醒机制是完全不一样的。要构造统一的 Waker 必然涉及多态,Rust 中是采用自定义虚表的方式实现的,通过
RawWaker 来构造 Waker,RawWaker 有个数据字段,和一个静态的虚表,不同的 Executor 就是要把这些虚表中的方法全部实现,
Waker 实现需要考虑的并发问题
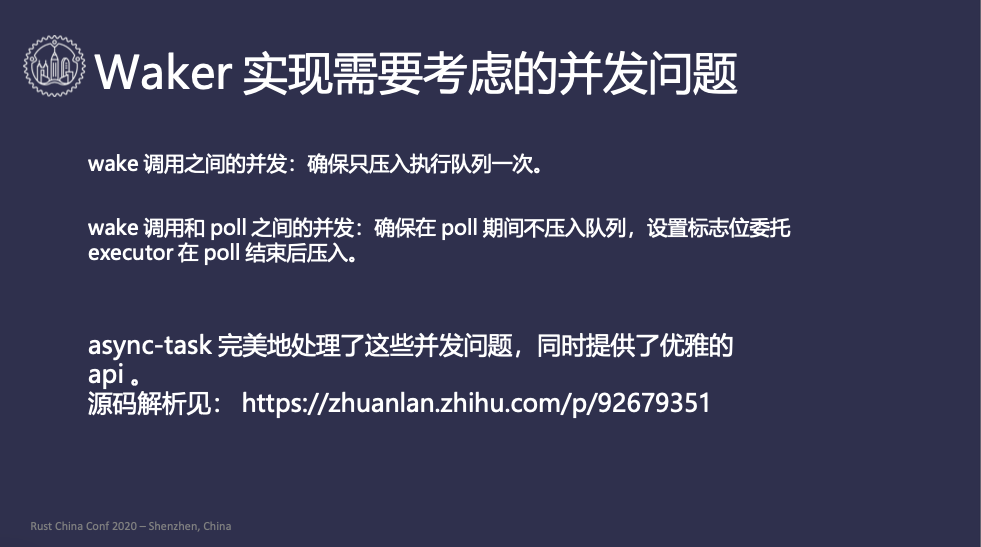
Waker 在实现上可能会有一些并发上的问题,我们先说第一个问题,wake 调用之间的并发,需要保证只将任务push执行队列一次。如果有两(多)个 Reactor 同时执行
Waker::wake 的话,两个 Reactor 都成功把任务 push 到全局队列里去,如果第一次push的让线程 A 拿到了,第二次pushed让线程 B 拿到了,线程 A 和 B
现在同时调用poll,因为 poll 本身 Self 参数是 &mut self 的,也就是说是互斥的,这样就会造成线程安全问题。
第二个问题,wake 调用和 poll 之间的并发,一个任务正在执行poll,但是之前调用poll的时候把已经Waker注册到一个 Reactor 中,这个 Reactor
突然好了,现在它调用Waker::wake试图把任务push到并发队列里去,如果push能成功的话,那么另一个线程从队列里取到任务,并尝试调用poll,而当前这个任务又在poll 的过程中,因此会导致和上面一样的并发问题。
async-task 完美的解决了这些并发问题,并且它提供了十分优雅的 API,我把源码解析放在了知乎上面,大家有兴趣可以看一下。
异步任务多线程 Executor
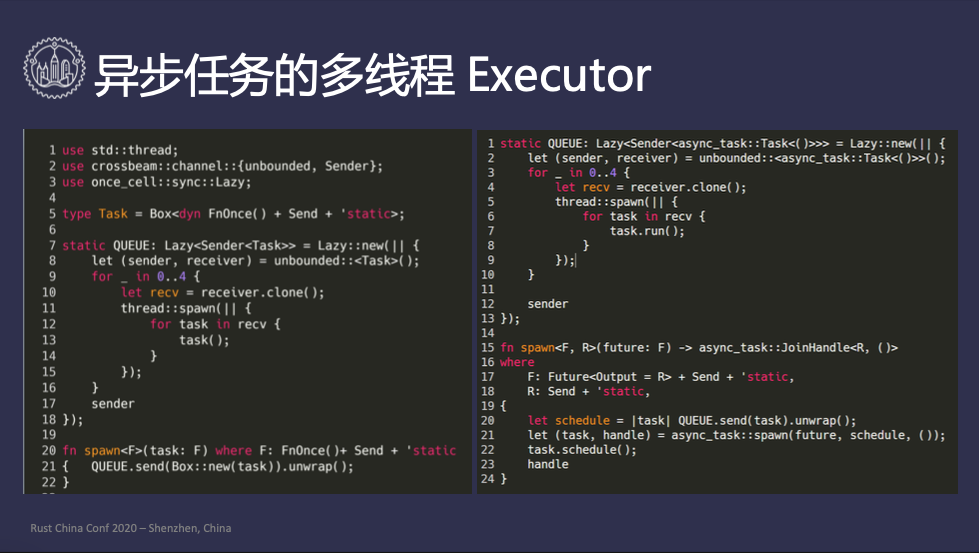
如果用 async-task 处理这个问题,代码应该是这样的:
#![allow(unused)] fn main() { use std::thread; use crossbeam::channel::{unbounded, Sender}; use once_cell::sync::Lazy; use async_task; static QUEUE: Lazy<Sender<async_task::Task<()>>> = Lazy::new(|| { let (sender, reciver) = unbounded::<Task>(); for _ in 0..4 { let recv = reciver.clone(); thread::spawn(|| { for task in recv { task(); } }) } sender }); fn spawn<F, R>(future: F) -> async_task::JoinHandle<R, ()> where F: Future<Output = R> + Send + 'static, R: Send + 'static, { let schedule = |task| QUEUE.send(task).unwrap(); let (task, handle) = async_task::spawn(future, schedule, ()); task.schedule(); handle } }
可以看到和之前的同步任务多线程池相比,工作线程的代码基本一致,spawn 函数有一些区别。使用 async_task 很简单实现了异步任务多线程池的处理。
Future 和 Reactor 之间的并发
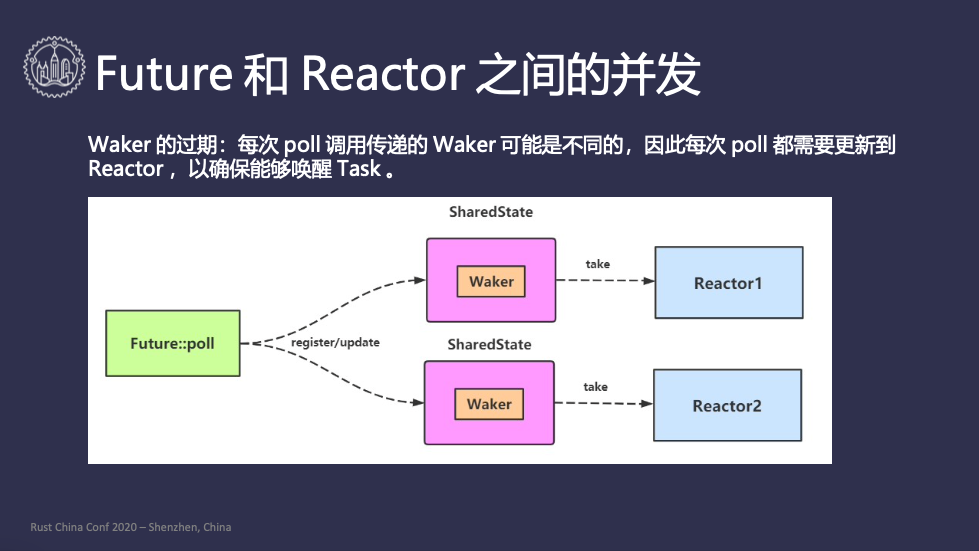
Future 如果poll的时候没有好的话,它负责把 Waker 注册到 Reactor 里去,这里面会有一个 Waker 过期的问题。第一次调用 poll 和第二次调用
poll 时,Executor 传的 Waker 可能不是同一个,只有最新的 Waker 能把 task 唤醒,老的 Waker 就唤不醒,这样导致的问题是每次 poll
的时候都要把 waker 更新到 Reactor 里,以确保能够唤醒 task。
比如上图中的例子,Future 同时对两个事件感兴趣,对应着两个 Reactor。Future 在 poll 的时候需要向 Reactor1 注册 waker,也要向
Reactor2 注册 waker,当它下次 poll 的时候每次都要把两个 waker 更新,那么现在问题来了,Future 的 poll 执行在 Executor 线程,Reactor 执行在 Reactor 线程,一个线程往里面写,另一个线程试图从里面读,并发问题就出现了。为了处理这个问题,最简单的方式就是加一把锁,每个 Reactor 都要加锁解锁,这个操作本身就比较复杂,比较耗时。
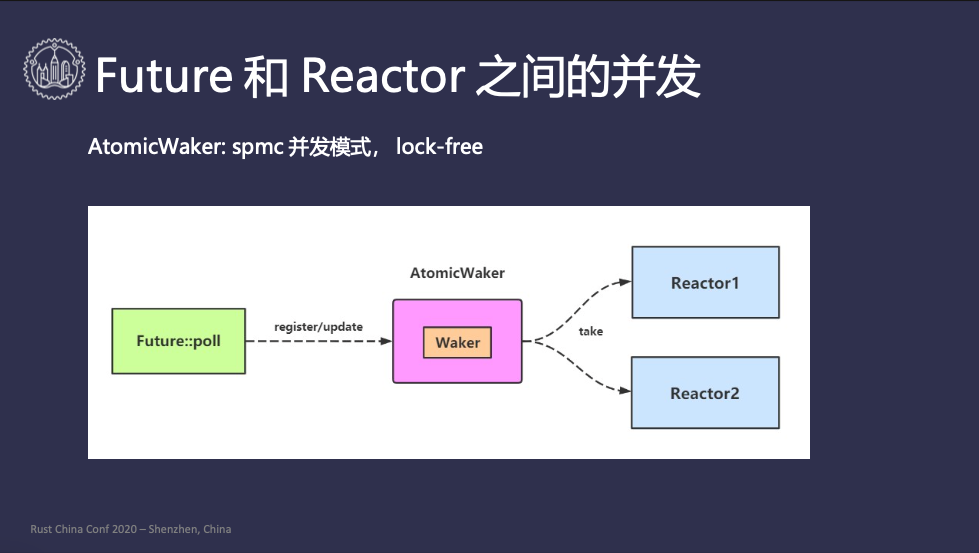
AtomicWaker 完美处理了这个问题,它通过单生产者多消费者的模式,将 waker 放到 AtomicWaker 里面,AtomicWaker 被多个 Reactor
共享,Waker只需要更新一次,所有 Reactor 就能拿到最新的 waker。
Future 的可组合性
异步任务本身是可以组合的,比如发起一个 HTTPS 请求涉及查询 DNS 拿到 IP,建立 TLS
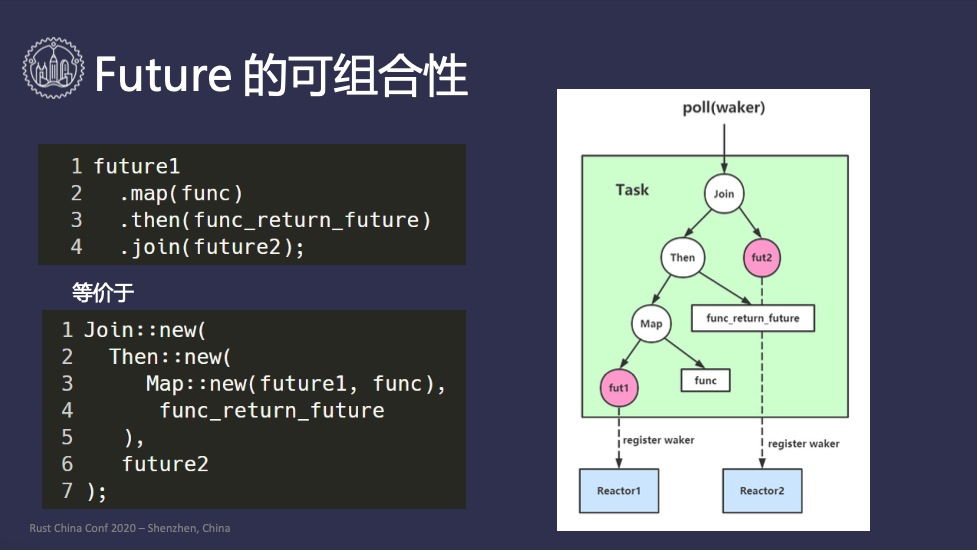
链接,发送请求数据,拿到响应数据,过程中的每一步都是异步任务,把这些异步任务组合到一起就是一个大的异步任务。 Future本身设计也是可组合的,比如下面的代码:
#![allow(unused)] fn main() { future1 .map(func) .then(func_return_future) .join(future2); }
因为 Future 要执行的话必须发到 Executor 里面,因此上面的代码还没有发到 Executor 里面去,所以它本身是没有执行的。上面的代码等于:
#![allow(unused)] fn main() { Join::new( Then::new( Map::new(future1, func), func_return_future ), future2 ); }
它是一个声明式的,最终会产生一个结构体,是一个如上图所示的树形结构,当整个任务丢到 Executor 里去执行的时候,poll 方法 Future 的树根结点开始,执行到叶子节点,最底层的叶子节点 futrue 是专门跟 Reactor 打交道的,所以大部分开发者是不需要关心 Reactor 的,因此可能对 Reactor 概念可能了解不多。
当一个叶子节点没好的时候,它会把传下来的 waker 注册到 Reactor 里面去。当Reactor 发现任务可以继续推进了,会调用 waker 把 任务
放入到全局队列中,某个线程拿到任务后,会重新从根节点 poll。以上就是整个的执行过程。
JoinN 组合的效率
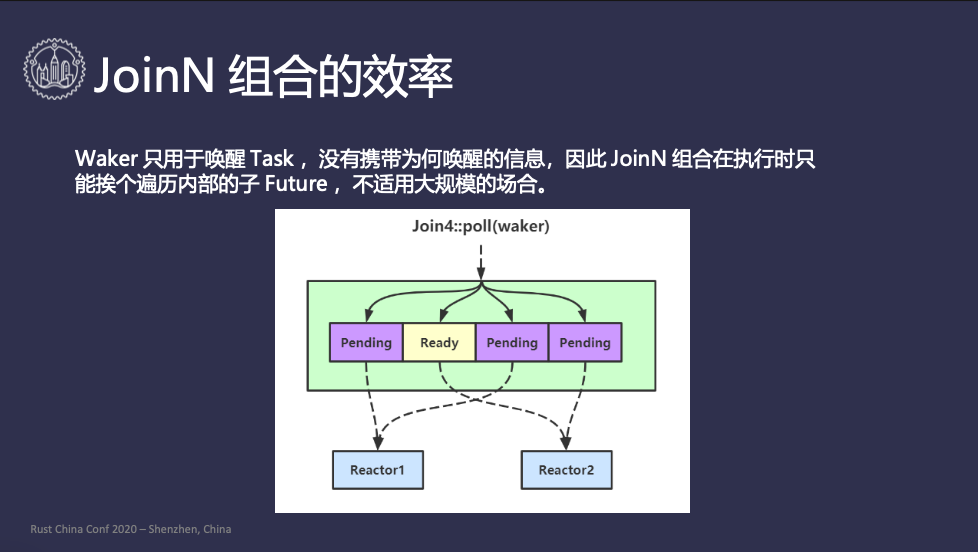
上面的 Future 组合模型涉及到一个 JoinN 组合的效率问题,问题是怎么产生的呢?waker 只用于唤醒整个task,但是没有携带任何唤醒信息,比如 task
是怎么被唤醒的。JoinN 负责把多个 Future 组合在一起同时并发的执行,Join4 把 4 个 Future 组合,每次 poll
的时候挨个去执行子 Future,如果没有好的话就会注册到 Reactor 里面,假设第二个突然就好了,下一次 poll 时,Join4
并不知道自己为什么被唤醒了,只能挨个再遍历一遍 Future,但其实第一、三、四都是浪费掉的。
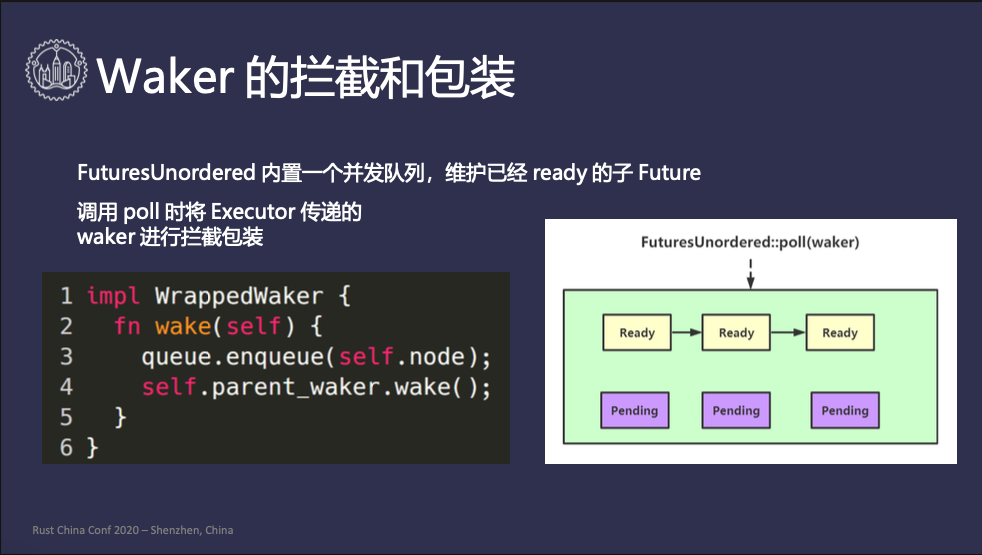
怎么解决这个问题呢?futures-rs 里面有一个 FuturesUnordered 专门处理这个事情,可以管理成千上万个子 Future,它内置了一个并发队列,维护已经
ready 的子 Future。当 Executor 在 poll 整个任务的时候,它只遍历并发队列,挨个拿出来执行,执行的时候并不是把 waker
原封不动的传下去,而是进行了一次包装拦截:wake调用的时候,它会先把 Future 添加到自己的ready队列里面去,再去通知Executor的全局队列,Executor
下次再
poll
的时候直接从内置的并发队列去执行 Future,这样能达到效率最大化。
异步任务之间的同步

传统多个线程之间也有同步的需求,比如说锁。异步任务之间也不可能是完全隔离的,它们之间可能做一些消息的交互,我们比较一下线程和 Task 之间的区别:
| 线程 | Task | |
|---|---|---|
| 睡眠 | thread::park | return Pending |
| 唤醒 | thread::unpark | Waker::wake |
| 获取方式 | thread::current() | poll的参数 |
线程如果想暂停工作可以调用 thread::park,task想暂停工作可以直接 return Pending;线程可以通过 thread::unpark 唤醒,task
需要调用 Waker::wake;获取方式上,线程直接调用 thread::current,task 是通过 poll 的参数拿到 waker。
异步任务之间的同步 Mutex
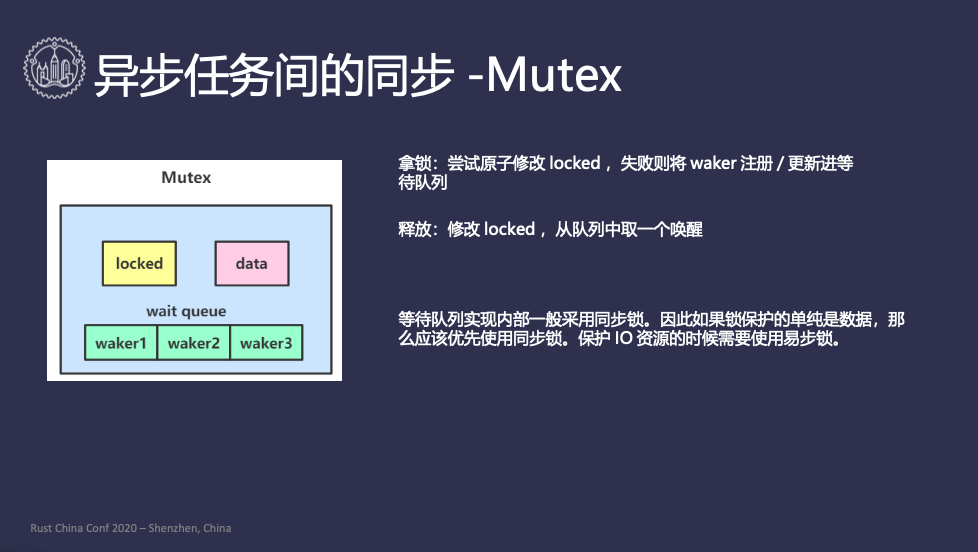
Mutex 数据结构里面有一个数据字段,表示要锁的数据,一个 locked
原子变量表示有没有被锁住,还有一个等待队列,异步任务想拿锁却没有拿到,它就只能进入等待队列里面,等着别人去通知它。先看一下拿锁的过程,如果 waker 拿到锁之前 locked 是
false,表示拿锁成功了,如果没拿到失败了的话,就只能等,把 waker 丢到等待队列里。拿到锁的任务想释放这把锁的时候,把 locked 改成 false,并从等待队列中拿一个
waker 出来,去唤醒相应的task。
这里跟大家讲一个很多人误区的地方,很多人认为异步任务里面是必须要用异步锁的,同步锁有阻塞就不行,这是不对的。大部分的等待队列的实现都是用了同步锁,也就是说 Mutex
也不是完全异步的,它本身有个同步锁在里面。如果你在应用里面只是想保护一段数据,对共享的数据做点加减操作,那么应该用 std
里面的同步锁,因为用异步锁的话,更新内部的等待队列需要加同步锁,这个开销可能比你直接用同步锁更新共享数据还要复杂很多。
那么什么时候用异步锁呢?在保护 IO 资源的时候,当你的锁需要跨越多个 .await,时间差的比较大的时候,那应该优先使用异步锁。
异步任务之间的同步 Oneshot
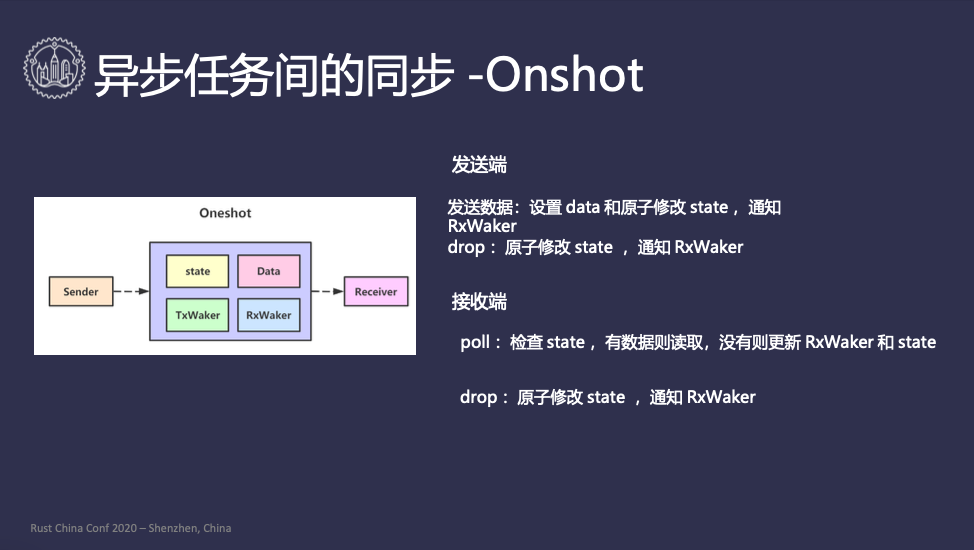
Oneshot 是做什么事情的呢?它负责在两个线程之间传递一个数据,一个 task 在执行,另一个 task 在等待,前者执行完会通过 Oneshot 把数据传递给后者。图上所示就是 Oneshot 的数据结构,state 中纪录了很多元信息,比如数据是否已经写了,sender 是否应析构掉了,TxWaker 是否已经存了,RxWaker 是否已经存了,receiver 是否已经 drop 掉了。
发送端发送数据的时候,首先在修改state前, data是完全由 sender 自由访问的,写完 data 后把 state 状态改掉,表示这个 data 已经写完了。然后把接收端的
RxWaker 取出来然后唤醒,唤醒之后 task 下次执行就可以把数据拿到了。如果 sender 没有发送数据,现在要把它析构掉,析构时要注意接收端还在一直等,因此 sender
析构是也要把 state 修改掉,把相关的 RxWaker 唤醒,通知 reciver 不要再等了。
接收端的实现是一个 Future,它本身在 poll 的时候会读取 state,如果有数据那就说明发送端数据已经写完了,直接读取数据。如果没有数据的话就要等待,把它的
waker 存在 Oneshot 的 RxWaker 里面,同时也更新相应的 state,表示接收端的 RxWaker 已经存在。接收端在 drop 的时候,也要通知
sender,表示“我现在对你的数据没有兴趣了,你可以不用继续计算下去",所以接受端在 drop 的时候也要修改 state,从 Oneshot 里面拿到发送端的
TxWaker,把发送端唤醒。
异步任务之间的同步 WaitGroup

接下来讲一下我自己实现的 WaitGroup,它在 golang 里面是非常常见的。它可以构造出多个子任务,等待所有的子任务完成后,再继续执行下去,下面是一个演示代码:
#![allow(unused)] fn main() { use waitgroup::WaitGroup; use async_std::task; async { let wg = WaitGroup::new(); for _ in 0..100 { let w = wg.worker(); task::spawn(async move { drop(w); }); } wg.wait().await; } }
首先先构造一个 WaitGroup,然后创建 100 个 worker,在每个任务执行完后,只要把 worker drop 掉,就说明任务已经完成了。然后 WaitGroup
等到所有的子任务完成后继续执行。下面介绍一下它的实现,其实比较简单:
#![allow(unused)] fn main() { struct Inner { waker: AtomicWaker, } impl Drop for Inner { fn drop(&mut self) { self.waker.wake(); } } pub struct Worker { inner: Arc<Inner>, } pub struct WaitGroup { inner: Weak<Inner> } impl Future for WaitGroup { type Output = (); fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output> { match self.inner.upgrade() { Some(inner) => { inner.waker.register(cx.waker()); Poll::Pending } None => Poll::Ready(()) } } } }
注意到如果某一个 worker 完成了 task,它并不需要去唤醒 Waker,WaitGroup 只关心所有任务都结束了,只需要让最后一个 worker 去唤醒
waker。什么时候是最后一个 worker 呢?我们可以借用标准库里的 Arc,Arc 是一个共享引用,当所有的 Arc
强引用都销毁的时候,就会析构内部的数据,只要在 Arc 包装的数据的 drop 方法里面把 waker 唤醒就可以了。
WaitGroup 持有一个弱引用,所有的 Worker 都持有强引用,WaitGroup 在 poll
的时候试图把弱引用升级成强引用,如果升级失败了,说明所有的强引用都没了,也就是任务都执行完了,就可以返回 Ready。如果升级成功了,说明现在至少还有一个强引用,那就把 waker 注册到 AtomicWaker 里面。这里有一个边界条件,在升级结束的瞬间,所有的 worker 全部 drop 掉了,这时还不会调用
wake,因为在升级成功时,会产生一个临时的强引用
inner,这时更新waker后,在这个临时的强引用销毁的时候调用 drop,然后调用 waker.wake() 把任务唤醒,因此不会丢失通知。整个过程就完整了。