华为 | StratoVirt VCPU管理-Rust线程同步的实现
作者: 高炜 / 后期编辑:张汉东
StratoVirt是开源在openEuler社区的轻量级虚拟化平台,具备轻量低噪、强安全性的行业竞争力。
StratoVirt进程运行在用户态,在虚拟机启动之前,StratoVirt会完成启动之前的准备工作,包括虚拟机内存的初始化、CPU寄存器初始化、设备初始化等,启动,CPU寄存器初始化和虚拟机在运行过程中VCPU陷出事件的处理,都是由StratoVirt的VCPU管理模块CPU完成。如下是StratoVirt中VCPU管理模块的组成,以及其在StratoVirt中的位置。
stratovirt
├── address_space
├── boot_loader
├── Cargo.lock
├── Cargo.toml
├── cpu
│ ├── Cargo.toml
│ └── src
│ ├── aarch64
│ │ └── mod.rs
│ ├── lib.rs
│ └── x86_64
│ ├── cpuid.rs
│ └── mod.rs
├── devices
├── machine_manager
├── micro_vm
├── src
│ └── main.rs
├── sysbus
├── util
└── virtio
StratoVirt VCPU模块的整体设计
StratoVirt的虚拟化解决方案也是一套软硬结合的硬件辅助虚拟化解决方案,它的运作依赖于硬件辅助虚拟化的能力(如VT-X或Kunpeng-V)。VCPU模块的实现也是紧密依赖于这一套硬件辅助虚拟化的解决方案的。
对于物理机的CPU而言,硬件辅助虚拟化为CPU增加了一种新的模式:Non-Root模式,在该模式下,CPU执行的并不是物理机的指令,而是虚拟机的指令。这种指令执行方式消除了大部分性能开销,非常高效。但是特权指令(如I/O指令)不能通过这种方式执行,还是会强制将CPU退出到普通模式(即ROOT模式)下交给内核KVM模块和用户态StratoVirt去处理,处理完再重新回到Non-Root模式下执行下一条指令。
而StratoVirt中的VCPU模块主要围绕着KVM模块中对VCPU的模拟来实现,为了支持KVM模块中对CPU的模拟,CPU子系统主要负责处理退出到普通模式的事件,以及根据在GuestOS内核开始运行前对VCPU寄存器等虚拟硬件状态的初始化。整个VCPU模块的设计模型如下图所示:
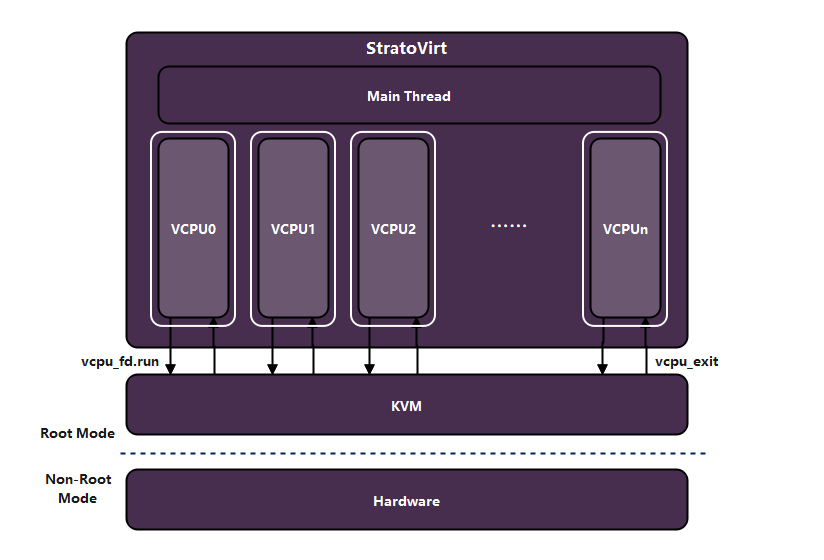
StratoVirt通过第三方库kvm_ioctls来完成和KVM模块的交互,通过匹配vcpu_fd.run()函数的返回值来处理退出到ROOT模式的事件,该函数的返回值是一个名为VcpuExit的枚举,定义了退出到ROOT模式的事件类型,包括I/O的下发、系统关机事件、系统异常事件等,根据事件的类型VCPU将对不同的事件作出各自的处理。以上的整个过程都被包含在一个独立的VCPU线程中,用户可以自己通过对VCPU线程进行绑核等方式让虚拟机的VCPU获取物理机CPU近似百分之百的性能。
同时,对VCPU寄存器虚拟硬件状态信息的初始化则是和StratoVirt的另一个模块BootLoader相互结合,在BootLoader中实现了一种根据Linux启动协议快速引导启动Linux内核镜像的方法,在这套启动流程中,BootLoader将主动完成传统BIOS对一些硬件信息的获取,将对应的硬件表保存在虚拟机内存中,同时将提供一定的寄存器设置信息,这些寄存器设置信息将传输给VCPU模块,通过设置VCPU结构中的寄存器值,让虚拟机CPU跳过实模式直接进入保护模式运行,这样Linux内核就能直接从保护模式的入口开始运行,这种方式让StratoVirt的启动流程变得轻量快速。
在整个VCPU模块中,因为涉及到内核的KVM模块,少不了与C语言代码做交互。作为系统编程语言,Rust对FFI有非常完善的支持,让VCPU中和KVM模块交互的部分高效且安全。
VCPU线程模型同步
VCPU模块还有一大职责就是管理VCPU的生命周期,包括new(创建),realize(使能),run(运行),pause(暂停),resume(恢复),destroy(销毁)。New和realize的过程就是结构体创建和寄存器初始化的流程,run的过程即是实现KVM中VCPU运作和VCPU_EXIT退出事件处理的流程。
另外的三种生命周期的实现则涉及到对线程同步的精密控制,例如在虚拟机destroy的过程中,一般只有某一个VCPU接收到VCPU_EXIT中的SHUTDOWN事件,该VCPU线程需要把该事件传递到所有的VCPU线程,同步所有VCPU线程的状态,完成虚拟机的优雅关机。在这种场景下,我们就需要考虑在Rust中如何实现在多线程中进行状态同步。
Rust中通过条件变量来实现同步
Rust多线程编程中,有一类用于同步的机制叫做屏障(Barrier),用于让多线程来同步一些流程开始的位置,它相当于一个闸口,使用wait方法,将该线程放进临界区并阻塞住,只有每个Barrier都到达wait方法调用的点,闸口才会打开,所有的线程同步往下运行。
而在比较复杂的同步场景中,Rust还提供了另一个同步机制条件变量(Condition Variable)来支持更复杂的同步场景,它和屏障的功能类似,但是它并不阻塞全部进程,而是在满足指定的条件之前阻塞某个得到互斥锁的进程。也就是说,通过条件变量,我们可以在达到某种条件之前阻塞某个线程,这个特性可以让我们很好得对线程进行同步。
为了支持各种场景的同步控制,条件变量还提供了三个方法:
- notify_one(): 用来通知一次阻塞线程,如果有复数个线程被阻塞住,
notify_one会被一个阻塞的线程所消耗,不会传递到别的阻塞线程去。 - notify_all(): 用来通知所有的阻塞线程。
- wait_timeout(): 将当前线程置入临界区阻塞住并等待通知,可以设定一个
timeout来设置阻塞的最大时间,以免造成永久的阻塞导致程序卡死。
需要注意的一点是条件变量需要和锁一起使用,而在程序运行中,每个条件变量每次只能和一个互斥体(被Mutex等锁包裹都可称为互斥体)进行使用。
VCPU生命周期控制和线程同步
在CPU数据结构初始化时,创建一个互斥的生命周期枚举(CpuLifecycleState)和一个条件变量。
#![allow(unused)] fn main() { pub fn new( vcpu_fd: Arc<VcpuFd>, id: u8, arch_cpu: Arc<Mutex<ArchCPU>>, vm: Arc<Mutex<dyn MachineInterface + Send + Sync>>, ) -> Self { CPU { id, fd: vcpu_fd, arch_cpu, state: Arc::new((Mutex::new(CpuLifecycleState::Created), Condvar::new())), work_queue: Arc::new((Mutex::new(0), Condvar::new())), task: Arc::new(Mutex::new(None)), tid: Arc::new(Mutex::new(None)), vm: Arc::downgrade(&vm), } } }
以destory生命周期为例,在x86_64架构下,当某个VCPU线程接收到VcpuExit::Shutdown事件后,会将该线程的CpuLifecycleState修改为Stopped,并调用保存在CPU数据结构中一个指向上层结构的虚拟机destroy方法,该方法能遍历一个保存着所有CPU数据结构的数组,执行数组中每一个CPU的destory()方法,该函数的实现如下:
#![allow(unused)] fn main() { fn destory(&self) -> Result<()> { let (cpu_state, cvar) = &*self.state; if *cpu_state.lock().unwrap() == CpuLifecycleState::Running { *cpu_state.lock().unwrap() = CpuLifecycleState::Stopping; } else { *cpu_state.lock().unwrap() = CpuLifecycleState::Stopped; } /* 省略具体的关机逻辑 */ let mut cpu_state = cpu_state.lock().unwrap(); cpu_state = cvar .wait_timeout(cpu_state, Duration::from_millis(32)) .unwrap() .0; if *cpu_state == CpuLifecycleState::Stopped { *cpu_state = CpuLifecycleState::Nothing; Ok(()) } else { Err(ErrorKind::DestroyVcpu(format!("VCPU still in {:?} state", *cpu_state)).into()) } } }
作为CPU的成员方法,destory函数能获取到每个CPU数据结构的互斥状态和条件变量,此时将除触发VCPU外所有的CPU数据的互斥状态解锁,并将状态从运行时的Running修改为VCPU关机时的Stopping。这里要注意一点,此时所有CPU的destroy函数都是在触发关机事件的VCPU进程中进行的,而不是在每个VCPU各自的进程中进行。
紧接着进入Stopping状态后,destroy函数会执行每个VCPU各自的关机逻辑,包括触发VCPU,这部分主要还是与KVM模块进行交互,进行一些退出状态的变更等。在执行完VCPU的关机逻辑后,条件变量会进入到wait_timeout的等待状态,它的参数为每个VCPU的CpuLifecycleState生命周期状态枚举和等待超时时间,也就是说在该生命周期枚举状态变化前,该线程都会进入阻塞状态。
此时除触发VCPU外的VCPU线程中,CpuLifecycleState都已经进入了Stopping状态,在所有VCPU线程中,VCPU的指令模拟函数kvm_vcpu_exec()都运行在一个循环中,对于每次循环的入口,都会执行ready_for_running()函数进入是否继续模拟的判断,在该函数中会对每个VCPU对应的CpuLifecycleState进行监控,当发现CpuLifecycleState已经变成Stopping时,VCPU将会退出循环,不继续进行VCPU的模拟,退出模拟的循环后,将会修改CpuLifecycleState为Stopped:
#![allow(unused)] fn main() { // The vcpu thread is about to exit, marking the state of the CPU state as Stopped. let (cpu_state, _) = &*self.thread_cpu.state; *cpu_state.lock().unwrap() = CpuLifecycleState::Stopped; }
修改VCPU线程中互斥的生命周期状态枚举后,将会触发阻塞线程中对应的wait_timeout()函数,同时,该VCPU线程的生命周期结束。而对于阻塞线程,当其余VCPU线程的状态都已经变成Stopped后,阻塞解除,此时,所有的VCPU线程都已经状态都已经同步到了Stopped,线程状态同步成功。
用类似思路也可以实现pause(暂停)和resume(恢复)的生命周期控制。
关注我们
StratoVirt当前已经在openEuler社区(openEuler是一个开源、免费的Linux发行版平台,将通过开放的社区形式与全球的开发者共同构建一个开放、多元和架构包容的软件生态体系)开源。在未来的一段时间我们将开展一系列主题的分享,让大家更加详细的了解StratoVirt实现,非常期待您的围观和加入!
项目地址:https://gitee.com/openeuler/stratovirt
项目wiki:https://gitee.com/openeuler/stratovirt/wikis